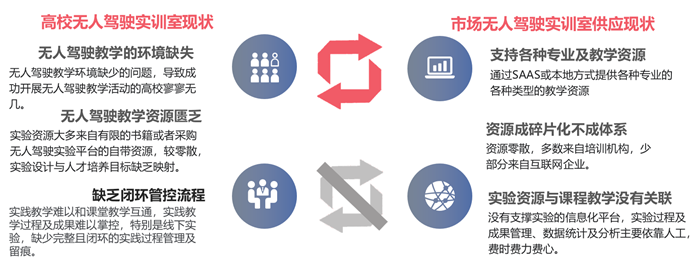
高校無人駕駛實訓室供需現狀
隨著無人駕駛行業對於畢業生實踐能力要求的逐漸提升,各高校對無人駕駛技術實訓室的建設投入逐漸增加。但是目前很多高校缺失無人駕駛技術實訓室,而市場上的實訓室供應商大部分只能提供無人駕駛教學平台環境,但教學資源配套碎片化、不成體系,與專業人才培養體系及課程教學的匹配度低,不能完全滿足學校的要求。
依託東軟睿馳無人駕駛實訓室產業化數據與解決方案,研製東軟教育無人駕駛實訓室,滿足高校無人駕駛技術教學需求。
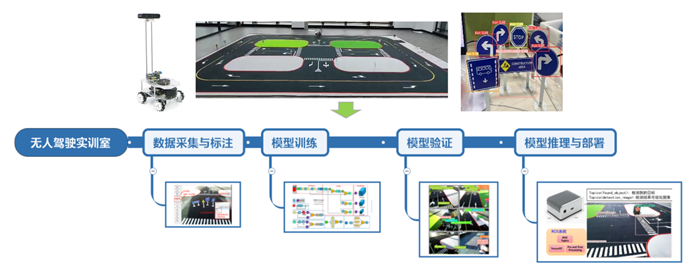
無人駕駛實訓部署在Nvidia Jetson TX1邊緣計算平台上,利用沙盤和無人駕駛小車,結合人工智慧演算法、激光雷達SLAM技術實現決策控制和路徑規劃,實現無人車在沙盤內自動行駛。同時該實訓室通過①數據採集與標註、②模型訓練 、③模型驗證、④模型推理與部署,覆蓋人工智慧教學整個工作流程。
• 項目包括5個一級項目和58個實踐任務。
• 人工智慧和自動駕駛的相關技術相結合,提高專業知識理解與工程實踐能力。
• 實訓項目細緻詳實,簡化理論,突出AI能力實踐訓練。
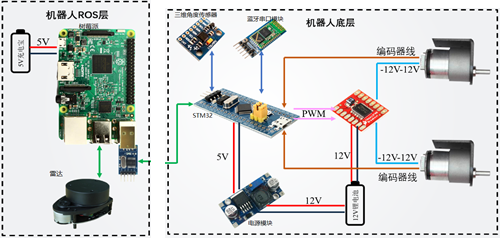
無人駕駛智能車底層硬體應用實踐
對機器人底盤硬體結構以及軟體的工程結構,進行了運動學分析,對用到的硬體介面編程進行了詳細的介紹,如編碼器運動速度的讀取、PWM伺服電機的控制、I2C陀螺儀的控制等,並對freeRTOS進行了簡單介紹。
無人駕駛智能車應用實踐
可覆蓋無人駕駛智能車的工作原理和基礎操作,具體包括無人駕駛智能車的硬體組成、虛擬機搭建、ROS基本操作和遠程登錄無人車並進行控制等,可以實際動手操作實現激光雷達數據讀取與測距、深度攝像頭讀取與測距、巡線行駛和色塊跟隨等任務,有助於了解和應用無人駕駛智能車。

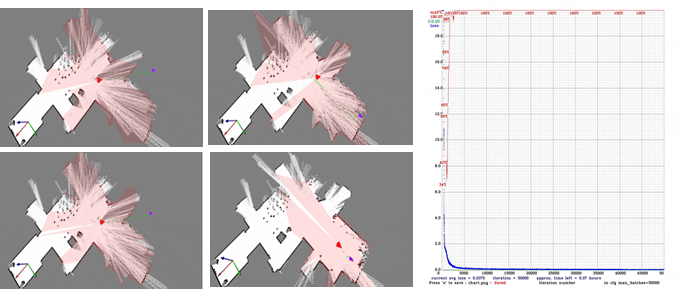
基於雷達的環境感知與自主導航
包括雷達的硬體結構、測距原理、通信協議,在此基礎上完成了雷達定位與建圖、進行了建圖常用演算法的比較。此外還完成了路徑規劃與導航的講解,實現了無人車多點導航。
基於AI的沙盤場景內無人車自動駕駛
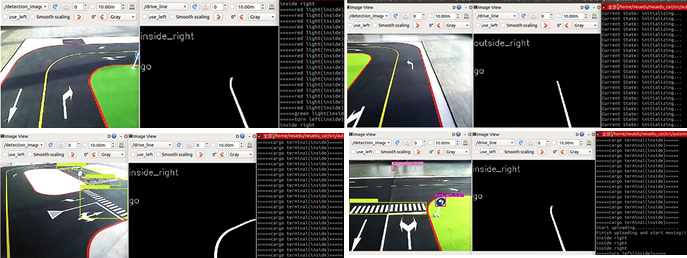
基於模擬地圖沙盤和無人駕駛智能車,結合人工智慧演算法、激光雷達和深度攝像頭處理演算法等,實現無人駕駛智能車在模擬地圖沙盤中的自動駕駛。項目基於Ubuntu系統和ROS系統進行開發,包括完整的視覺感知操作流程和無人駕駛功能實現過程,覆蓋了AI深度學習演算法的全部開發流程,細緻講解了人工智慧演算法從數據採集與標註、模型訓練、模型驗證與推理到模型邊緣側部署,以及無人駕駛環境感知與決策控制設置的全部過程。

基於視覺的環境感知與無人車運動控制
無人駕駛智能車基於視覺的環境感知、路徑規劃和自主導航功能,通過RGBD攝像頭或與激光雷達融合感知周圍環境,構建當前環境的3D點雲地圖和2D柵格地圖,並根據已構建地圖通過相關演算法實現路徑規劃和自主導航和實時避障。
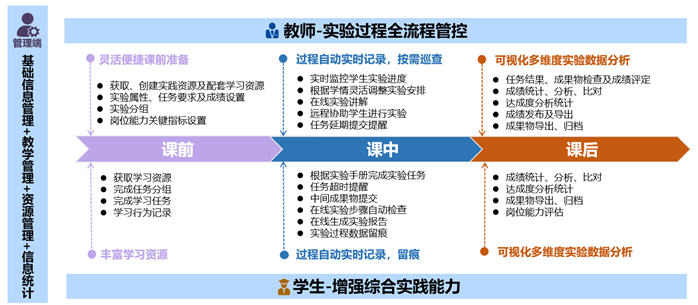
無人駕駛實訓室搭配雲實踐平台,可為教師提供多場景的實驗環境支持、實驗過程的自動步驟檢查及數據收集、實驗環境保存、實驗過程實時監控及遠程協助等功能,全面提高實驗教學管理的質量及效率,讓老師和學生省時、省心、省力。





 辽公网安备 21029602000700号
辽公网安备 21029602000700号